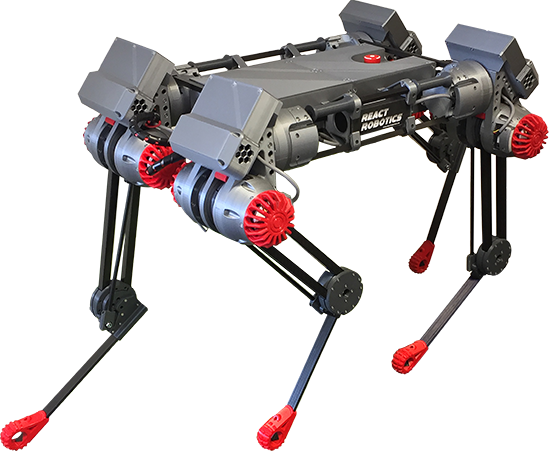
Lightweight, agile quadruped robot for AI research and enterprise applications
Introducing DogBot
DogBot was originally designed as an in-house platform for developing AI systems which could interact with the real world, as a means of researching embodied AI, before being pursued as a product, aimed initially at fellow AI researchers.
DogBot is no longer on the market, as React AI is focused on software and the opportunities of the latest AI developments.
DogBot was marketed under the React Robotics brand.
Our Dogbots
Prototype
The first DogBot didn’teven have a name!
YoYo
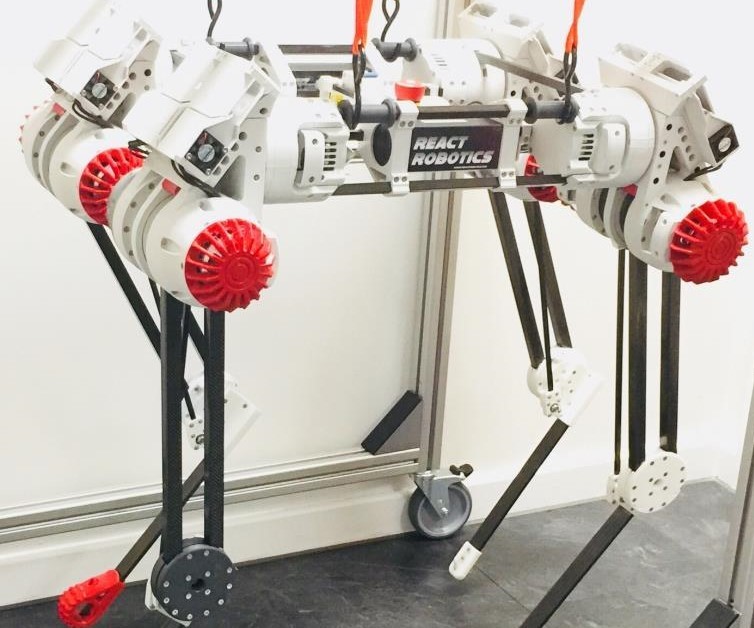
The first ‘proper’ DogBot, YoYo, could walk and trot
Our aim with DogBot was to produce a robot with the capabilities of navigating through real-world environments, with all their messiness and unpredictabilty.
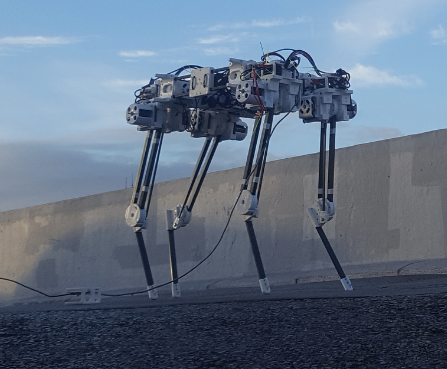
We took Gyro to a high-rise building site in London, and put it through its paces equipped with an industrial scanner produced by our partners at Faro
We moved on from DogBot, but wanted to leave something behind, and we love open-source at React AI. So we uploaded a URDF file to GitHub so anyone can place a DogBot model in a simulated environment.
We also uploaded the CAD files and supporting materials for the real thing, to Hackaday, so you could try building your own!
Footnote: Where are they now?
Tango is still at Imperial College, but after one of our home offices was flooded in 2022, during the refurbishment YoYo and Gyro were relocated to their current spots, dangling from the ceiling!